GeoSLAM and Bentley Systems Join Forces to Take Mobile Reality Modelling Indoors
GeoSLAM and Bentley Systems have announced a partnership to enable the simple and fast production of hybrid reality models in any environment. After having presented fast 3D laser scanning using a handheld mobile scanner, the next stage is to further improve how the results can be both interpreted and consumed within typical engineering and GIS workflows.
Bentley Systems’ reality modelling software, ContextCapture, available on desktop and mobile devices, produces engineering grade textured 3D models for design, construction, and operations derived purely from photographs. A quick and inexpensive way to provide real world context, the software is commonly used for modelling outdoor environments either from images taken from the ground or with the use of drones.
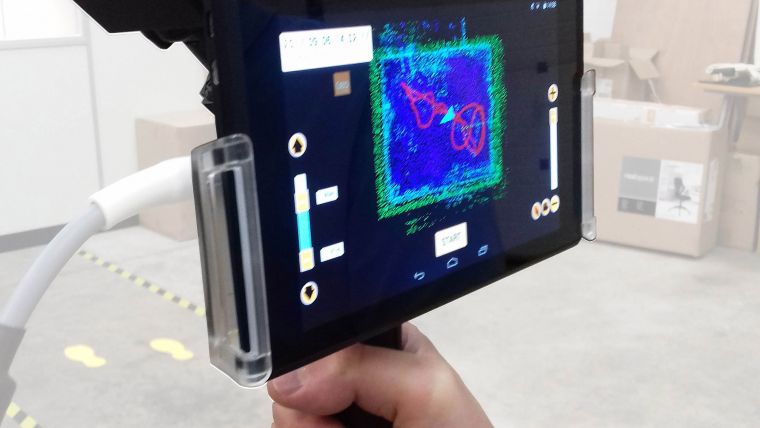
Through a combination of using the GeoSLAM ZEB-REVO mobile mapping system and ZEB-CAM and the latest version of Bentley’s ContextCapture software, it is possible to produce high-resolution textured reality meshes of indoor scenes, complex infrastructure and other challenging environments faster than ever before.
Mark Reid of GeoSLAM will be presenting the ZEB-REVO/ContextCapture solution at the Bentley ‘Year in Infrastructure’ conference 2017 taking place from 9-12 October 2017 at the Sands Expo and Convention Centre, Marina Bay, Singapore.
Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)










