Pix4D Extends Drone-based Imagery with Machine Learning Techniques
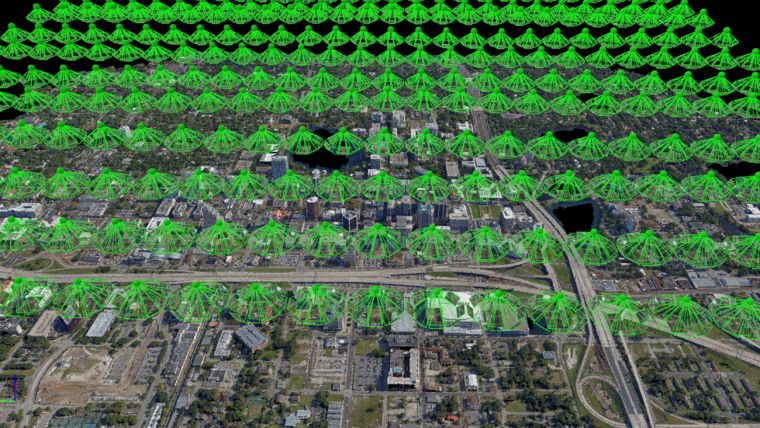
Pix4D has introduced a new image classification technique as part of its Pix4Dmapper photogrammetry software. The solution uses new machine vision techniques for photogrammetry for automatically classification of drone-based point clouds. By using this feature, entire 3D point clouds are classified into individual groupings, divided into categories such as buildings, roads or vegetation.
The solution has recently been integrated in Pix4Dmapper, the company’s photogrammetry software product. Ideally, a situation would exist where raw imagery would be converted automatically by the software into 3D models with attributed semantic information, but this new feature is a significant step in that direction and introduces machine learning tools in photogrammetric workflows.
At this moment, the feature distinguishes between five different categories: buildings, high vegetation, human-made objects, roads and ground. Before, this classification took a lot of time and had to be done manually by isolating the data of interest: now, the company claims 10 million points can be classified in 3 minutes. These will be used to automatically generate DTM´s, meaning a surface model without any (natural or man-made) objects. This explains why the classification scheme includes high vegetation (for example trees), which are removed when a DTM is created.
In the near future, this classification scheme will be developed and refined further, so that buildings can be extracted and modelled as a semantic composition of geometry, including elements such as roofs, facades, windows, doors and balconies. Other applications that benefit from the classification scheme are volume measurement and vegetation growth control.
Machine-learning technology refers to software algorithms that refine themselves by processing more data, a famous example being Google´s search algorithms that get refined over time, taking the searches of users as input to this process. Pix4D employed the same technique by giving its algorithms test data and telling what the data represented visually, in order to apply the classification system described and over time the system got better and quicker from the learning process.
Each individual point in a 3D point cloud that is generated through Pix4D’s software is referenced to all the images used to calculate it, providing extra information to the machine learning process and can be used for more realistic 3D visualisations, analysis and measurement that can be used for applications that previously relied on stereo-pair matching. This technique is called rayCloud and is also integrated into Pix4Dmapper.
One area that can benefit from the new classification feature is the construction surveying industry, realising time and cost savings over terrestrial laser scanning. Apart from point cloud classification, the Pix4Dmapper software also offers functionality to manually edit point group classifications, adding or removing selected points, adding new groups and more. The Pix4D point cloud data can also be exported to Autodesk or Bentley software, as a LAS file including the classifications or no more than a subset of the classifications to software that doesn´t recognise the LAS data format.
Value staying current with geomatics?
Stay on the map with our expertly curated newsletters.
We provide educational insights, industry updates, and inspiring stories to help you learn, grow, and reach your full potential in your field. Don't miss out - subscribe today and ensure you're always informed, educated, and inspired.
Choose your newsletter(s)










